Programming #
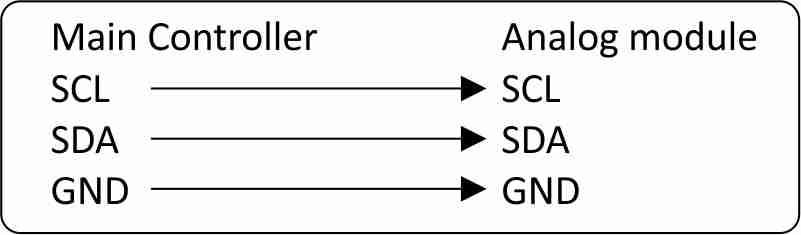
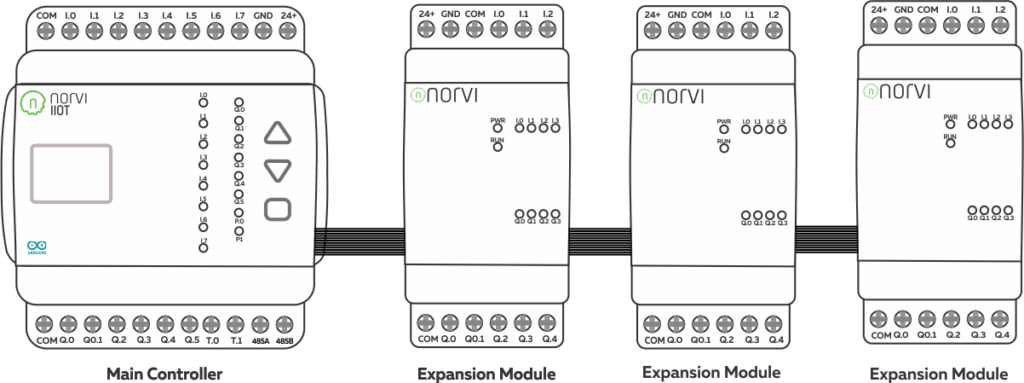
NORVI-EX-Q4 uses MCP230008 over I2C communication. The I2C addresses of the devices can be configured with the DIP switches at the bottom of the controller. It can Daisy chain up to eight expansion modules.
Expansion Port #
The expansion port of the NORVI IIOT Controllers can be utilized for external sensor connections where raw GPIO connections are required, or they can be used to plug NORVI Expansion Modules. Browse the NORVI Expansion Product Range. How to Connect NORVI Expansion Modules
I2C Address Setting #
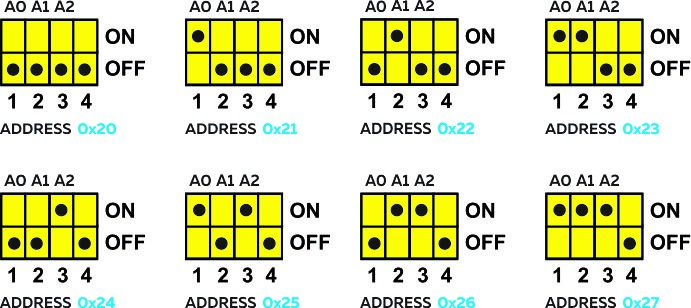
The I2C address of the expansion module can be configured by switching DIP switches at the bottom of the expansion module. The device can be configured at 8 I2C addresses using the first 3 DIP switches.
Transistor Outputs #
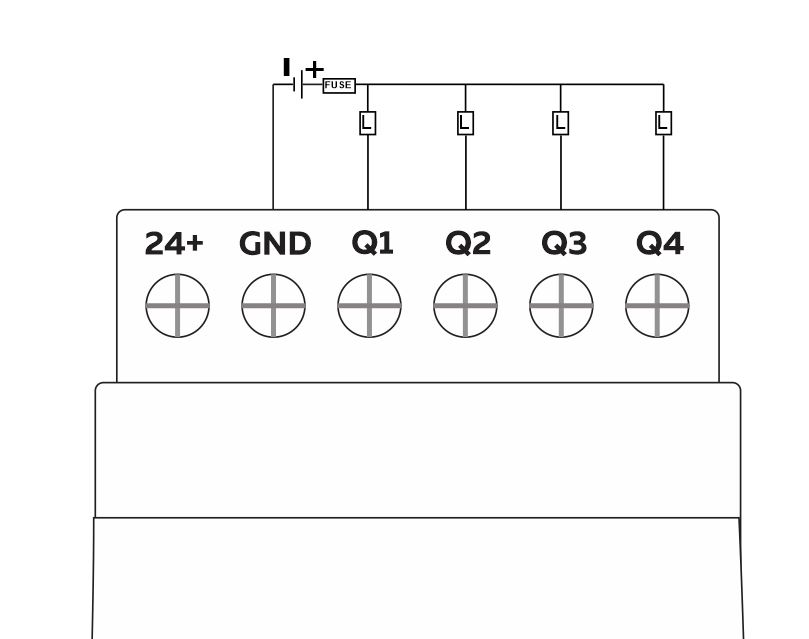
Wiring Transistor Outputs #
Programming Transistor Outputs #
Writing HIGH to the relevant GPIO of MCP230008 turns on the transistor output.
Refer to the GPIO Allocation Table for Transistor Output GPIO
Refer to the I2C Address setting to set the I2C address of the Expansion
#include <Adafruit_MCP23X17.h>
#define OUTPUT1 3
#define OUTPUT2 2
#define OUTPUT3 1
#define OUTPUT4 0
// uncomment appropriate line
Adafruit_MCP23X08 mcp;
void setup() {
Serial.begin(115200);
//while (!Serial);
Serial.println("NORVO Expansions Test");
// uncomment appropriate mcp.begin
Wire.begin (16, 17);
if (!mcp.begin_I2C(0x27)) {
Serial.println("Error.");
while (1);
}
// configure pin for output
mcp.pinMode(OUTPUT1, OUTPUT);
mcp.pinMode(OUTPUT2, OUTPUT);
mcp.pinMode(OUTPUT3, OUTPUT);
mcp.pinMode(OUTPUT4, OUTPUT);
Serial.println("Looping...");
}
void loop() {
mcp.digitalWrite(OUTPUT1, HIGH);
mcp.digitalWrite(OUTPUT2, LOW);
mcp.digitalWrite(OUTPUT3, LOW);
mcp.digitalWrite(OUTPUT4, LOW);
delay(500);
mcp.digitalWrite(OUTPUT1, LOW);
mcp.digitalWrite(OUTPUT2, HIGH);
mcp.digitalWrite(OUTPUT3, LOW);
mcp.digitalWrite(OUTPUT4, LOW);
delay(500);
mcp.digitalWrite(OUTPUT1, LOW);
mcp.digitalWrite(OUTPUT2, LOW);
mcp.digitalWrite(OUTPUT3, HIGH);
mcp.digitalWrite(OUTPUT4, LOW);
delay(500);
mcp.digitalWrite(OUTPUT1, LOW);
mcp.digitalWrite(OUTPUT2, LOW);
mcp.digitalWrite(OUTPUT3, LOW);
mcp.digitalWrite(OUTPUT4, HIGH);
delay(500);
mcp.digitalWrite(OUTPUT1, LOW);
mcp.digitalWrite(OUTPUT2, LOW);
mcp.digitalWrite(OUTPUT3, LOW);
mcp.digitalWrite(OUTPUT4, LOW);
delay(500);
Serial.println("Looping...");
}


